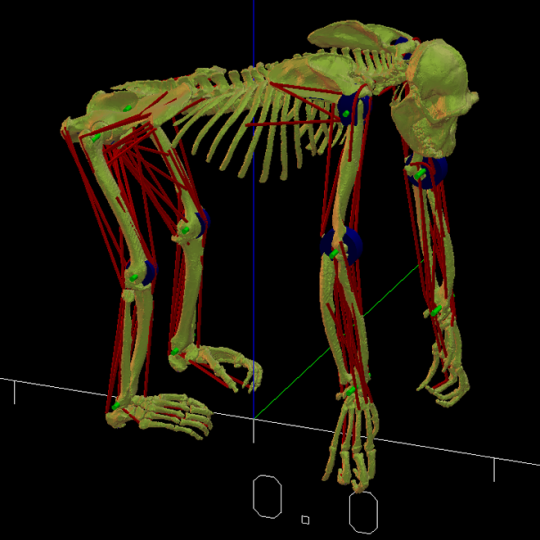
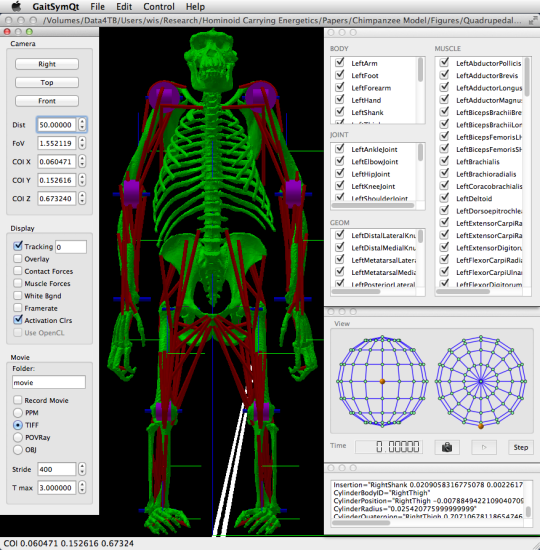
GaitSym er en forward dynamisk modellering program. Hva det betyr er at du angir de krefter og programmet bruker Newtons lover å beregne bevegelser. Du kan laste det ned her inkludert en rekke menneskelige og ikke-menneskelige 2D og 3D-modeller for å komme i gang. Den bruker den? Pne Dynamics Engine fysikkmotor for å gjøre det meste av det harde arbeidet og gir et filformat og visningssystem slik at brukeren ikke trenger å gjøre noe programmering. Den gir også forskjellige muskelmodeller, slik at kreftene kan genereres direkte fra muskelaktiveringsnivåer og en rekke kroker for å tillate den å bli brukt med en global optimalisering verktøy slik som genetiske algoritmer. Dens viktigste funksjoner er: Rask, fleksibel og robust Forward Dynamic Modeller; Sofistikert Kontakt System; Minetti-Alexander og Umberger-Gerritsen-Martin Muscle Modeller for Metabolsk kostnadsestimering; Via Poeng og Cylinder innpakning for Muscle Paths; Treghet Tensor Beregnet ut fra Trekant Mesh Outline; Verden eller Local Koordinatsystemer for Effektiv Model Creation. Full Kildekode inkludert (C ++ kompilerer på MacOSX, Windows, Linux og andre Unix-systemer); Komplett med en rekke menneskelige og ikke-menneskelige 2D og 3D-modeller; Produserer høykvalitets Stills og animasjoner via ekstern Ray-tracing
Hva er nytt i denne utgaven:.
Versjon 2013:
- Ny glidebryteren felles;
- Ny muskel modell inkludert sene demping, aktiveringskinetikk, ikke-lineær fjær respons, og bedre numerisk stabilitet;
- Nye boksen bilførere;
- Ny boks geom;
- Ny muskel stropp som kan vikle rundt to parallelle sylindere;
- Direkte punktsky visualisering;
- Abort på overdreven hengsel felles grense momentene, eller på data målet terskler;
- Den sporing stilling kan bli motvirket å sentral sporede simuleringer.
Kommentarer ikke funnet