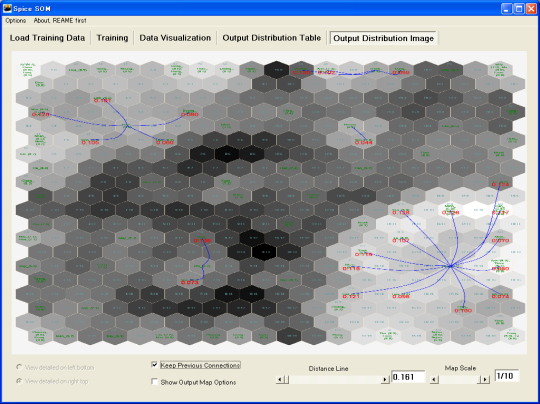
Skjermbilde programvare:
Prog.varedetaljer:
Versjon: 1.0.2
Last opp dato: 15 Apr 15
Utvikler: Dihav
Lisens: Gratis
Popularitet: 92
Størrelse: 11911 Kb
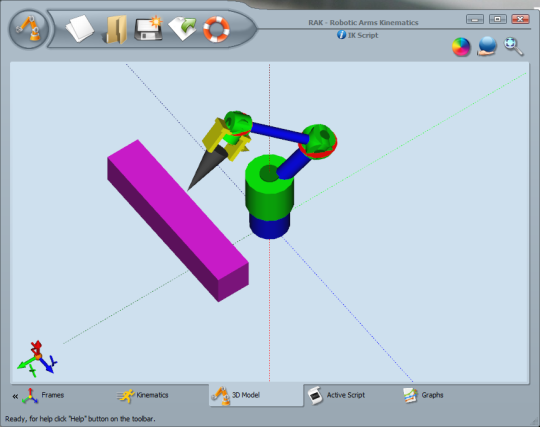
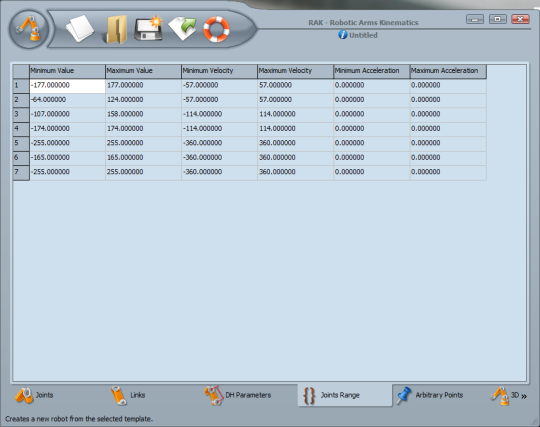
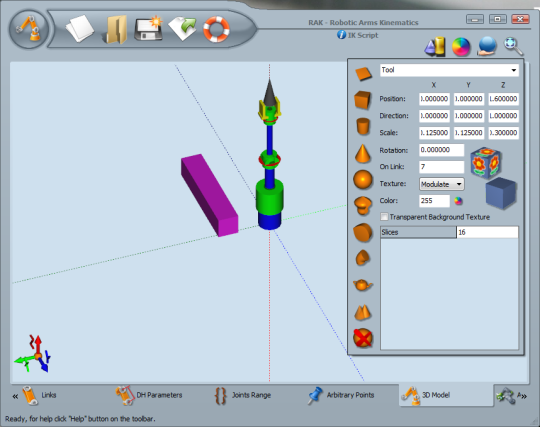
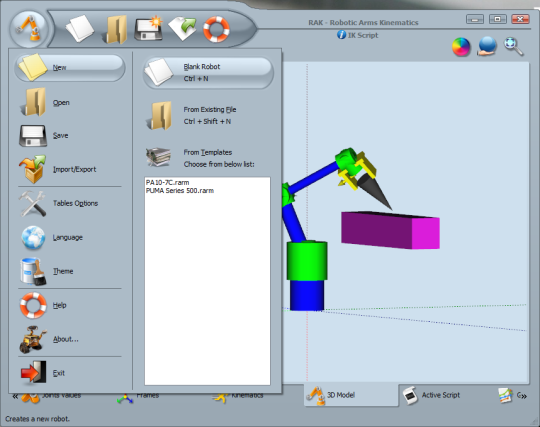
RAK er et program for modellering robotarmer og beregne sine kinematikk.
Dette programmet kan simulere åpen sløyfe, enkeltkjede roboter.
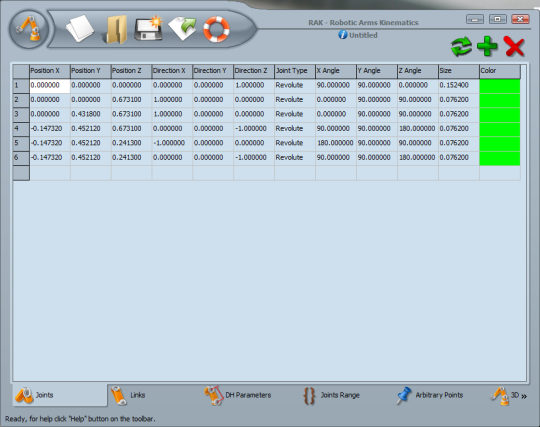
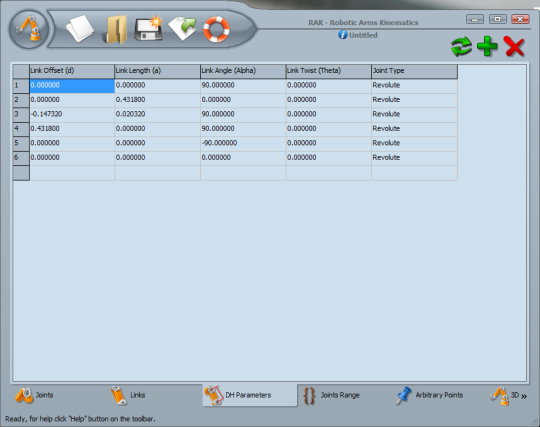
Du kan modellere en robot av sine ledd stillinger eller Denavit-Hartenberg (DH) parametere.
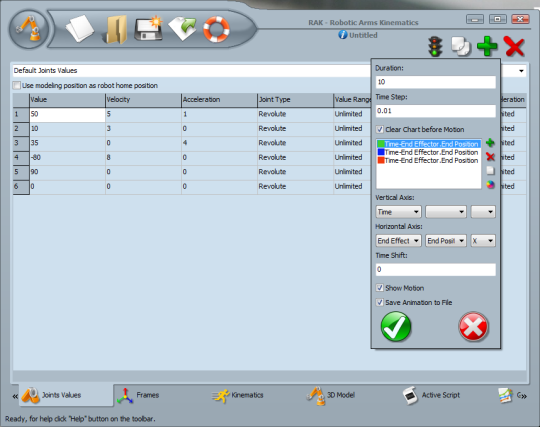
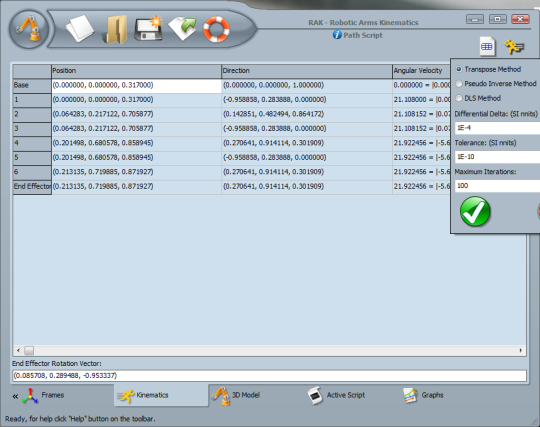
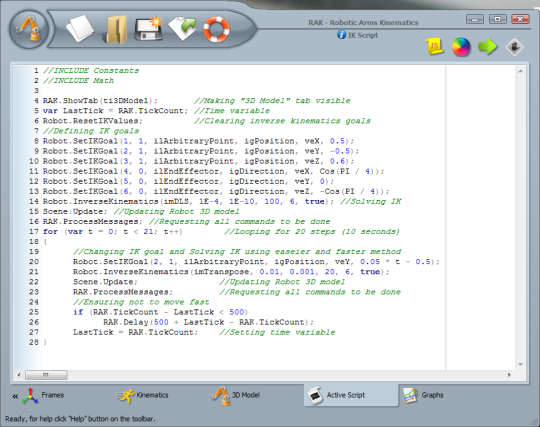
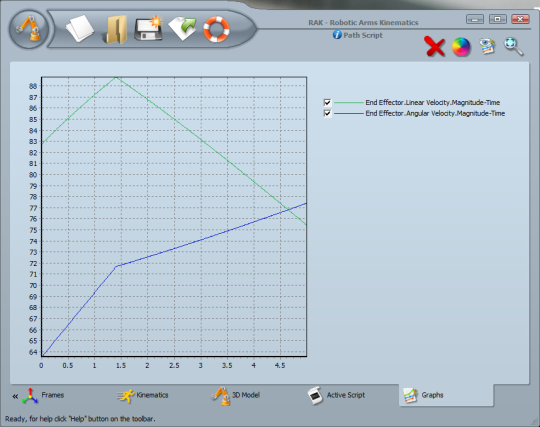
Du kan beregne kinematikk og inverse kinematikk av roboten ved dette programmet.
Det er også et programmerings område å skrive programmer og kontrollere ekte roboter.

Kommentarer ikke funnet